Laboratoriya mashg’uloti №4
Mavzu: Texnik ob’ektlarga immitatsion modellarni yaratish va tahlil etish.
Ishning maqsadi : Talabalarning MatLAB bilan ishlash ko’nikmalarini oshirish va unda imitatsion modellarni amalga oshirish.
Topshiriq:
Soddalashtirilgan prujina – amortizator sistemasini modellashtirish orqali avtomobilning kotarib turuvchi sistemasi holatini tahlil qilish yordamida MatLAB da imitatsion model yaratishni ko’rib chiqish (1 – rasm). Har xil turdagi yo'l sharoitlarini modellashtiradigan, kirish funksiyasiga kotarib turuvchi sistemaning reaksiyasini tavsiflovchi differentsial tenglama yozing. Vertikal siljishga bog'liqlikni o'rganish y , avtomobil kuzovining tebranishi c va risorning bikirligi k.
Avtomobilning kotarib turuvchi sistemasi S – modelini qurish. Blokli parametrlarini o'rnatish uchun MATLAB o'zgaruvchilaridan foydalaniladi. Modellashtirish natijasini Figure grafik oynasida chiqariladi. O'zgaruvchilarni tanlash, S – modelini chaqirish va natijalarni Figure grafik oynasiga chiqarish m – fayl orqali bajariladi. Kirish parametrlari
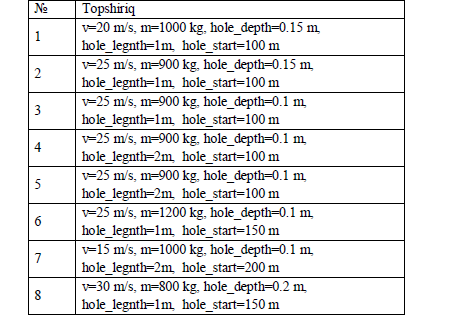
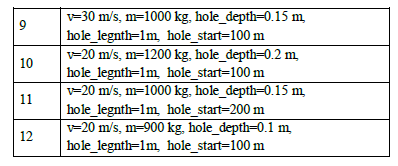
Vazifalar: avtomobil barcha qisimlarining faqat vertikal ko’chishi qaralsin; amortizator va prujinanig massasi hisobga olinmasin; shinaning amortizatsiyalash xususiyati va ogirligi hisobga olinmasin; avtomobil g’ildiragi ko’chishi kirish signallarini ikki bosqichli signallar yigindisi (Sources | Step) sifatida modellashtirilsin. Birinchi funksiya yo’ldagi chuqurga tushushini, ikkinchi funksiya esa chuqurdan chiqishini tahlil qiladi; Nyutonning II qonuni: Nyuton jismga qo’yilgan kuch bilan uning olgan tezlanishi va massasi orasidagi bog’lanishni aniqlash uchun gorizontal tekis sirtdagi aravachaning kuch ta'siridagi harakatini tekshirib, quyidagi xulosaga keldi: ~ ~ Bu xulosalarga asoslangan Nyuton II qonunni quyidagicha ta'riflanadi: “Kuch ta'sirida jismning olgan tezlanishi kuchga to’g’ri proporsional bo’lib, massasiga teskari proporsionaldir”, ya'ni: yoki . Kirish funksiyasi – avtomobil g’ildiragi y1 ning vertikal ko’chishi - ikki bosqichli signal orqali amalga oshiriladi: dastlab vertikal joy o'zgartirish 0 m ga to'g'ri keladi va g’ildirak chuqurgacha 100 m harakatlanadi; so’ngra g’ildirak 0.15 m li chuqurga tushadi va 1 m harakatlanadi, songra chuqurdan chiqib dastlabki 0 m holatiga kelib model tugagunga qadar harakatni davom ettiradi. v=20 m/s – avtomobil harakatining tezligi; m=1000 kg – avtomobil ogirligi; hole_depth=0.15m – yamaning chuqurligi; hole_lenght=1m – yamaning uzunligi; hole_start=100m yamagacha bolgan masofa: y1 m – vertikal harakatlanuvchi g’ildirakning kirish funksiyasi;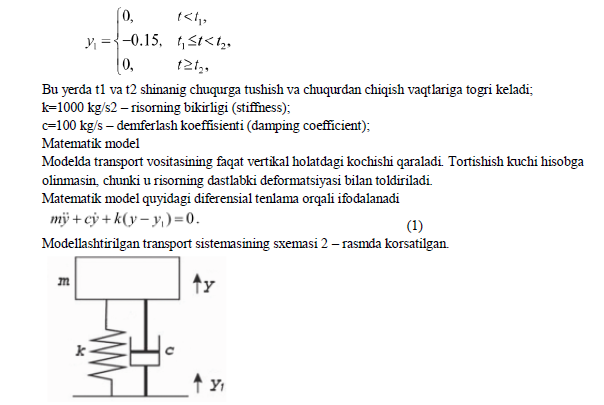
3.Simulink – model
1 – qadam. Ishchi katalogni joriy katalog sifatida ornating Current Directory. 2 – qadam. m – fayl ochamiz va uni tanlangan katalokga saqlaymiz va ozgaruvchilarni kiritamiz m, v, hole_depth, hole_length, hole_start, c, k va vaqt t1 chuqurga tushish va t2 chuqurdan chiqishni hisoblaymiz. Clear all; m=1000; % Avtomobil ogirligi (kg) v=20; % Avtomobil harakatining tezligi (m/s) k=1000; % Prujinaning bikirligi (kg/s^2) c=100; % Amortizatsiya koeffitsienti (kg/s) hole_start=100; % Yamagacha bolgan masofa (m) hole_lenght=1; % Yamaning uzunligi (m) hole_depth=0.15; % Yamaning chuqurlig (m) t1=hole_start/v; % Yamaga kirish vaqti (s) t2= (hole_start+hole_lenght)/v; % G’ildirakning yamadan chiqish vaqti (s) 3 – qadam. Simulink – model faylini L0501.mdl faylini yaratamiz . S – model konfiguratsiya parametrlarini kiritamiz start time = 0, stop time = 100, Solver Options Type = Fixed step, Solver = ode5 Dormand Prince, Fixed Step Size = 0.001. 4 – qadam. Gildirakning harakatini y1 ni ikkita sources | step bloklari orqali kiritamiz. Buning uchun: Modelga step1 va step2 bloklarini kiritamiz; Step1 blogiga quyidagi parametrlarni kiritamiz: Step time = t1; Initial value = 0; Final value = - hole_depth; Sample time = 0.001; Step2 ga quyidagi parametrlarni ornatamiz: Step time = t2; Initial value = 0; Final value = hole_depth; Sample time = 0.001;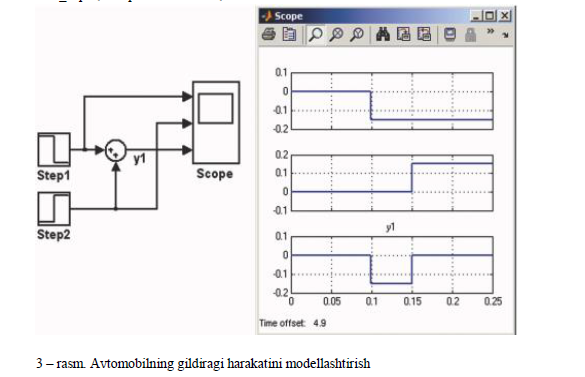
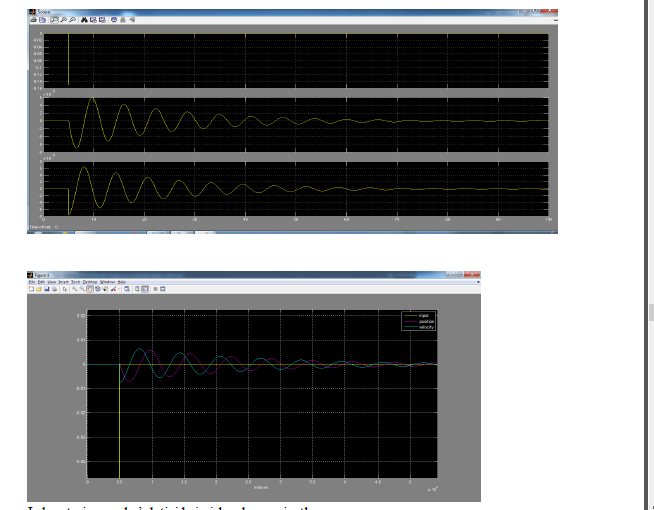
Signallarni Math operetions | Sum blogi orqali qoshamiz (3 - rasm). Natijani Scope blogiga ulab organamiz va tegishli vaqt oralig'ini tanlab, modeldagi konfiguratsiya parametrlarini boshlash vaqti va to'xtash vaqtini modellashtirishni tekshiramiz.
5 – qadam. Continuous | Integrator bloglari orqali biz 4 – rasmda korsatilganidek, harakat tezligi va tezlanishini ozgarishini aniqlaymiz.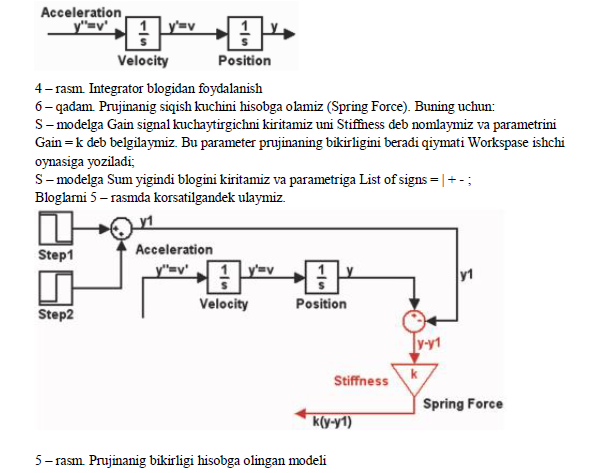
5 – rasm. Prujinanig bikirligi hisobga olingan modeli
7 – qadam. Porshanning qarshiligi va amortizatorning oz’aro tasiri kuchini hisobga olamiz (Damping Forse): Modelga Gain signal kuchaytiruvchi blogini kiritamiz uni Damping Constant deb nomlaymiz va Gain = c deb belgilaymiz. Qiymatini Workspace ishchi oynasiga kiritamiz; S – modelga Sum yigindi blogini kiritamiz va parametriga List of signs = | - - ; Stiffness va Damping Constant bloglarini Sum blogi orqali ulaymiz. Blog har ikkala kuchni qoshadi va avtomobilga ta’sir qiluvchi kuch hosil qiladi. Bloglarni 6 – rasmda korsatilgandek ulaymiz.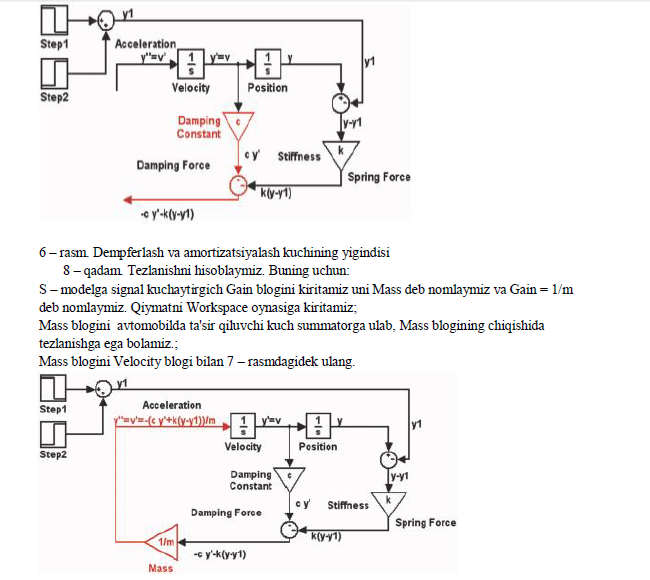
Nazorat savollari
1. Math Operations kutubxonasi vazifasi nima?
2. Gain bloki vazifasi? 3. Constant bloke vazifasi?